Robosapien V2 - Foot Motors Rewire
While (clumsily) taking the Robosapien V2 apart for the first time, I somehow managed to shear off two wires from one of the connectors when the back plate, to which the arms of the Robosapien V2 are attached.
In the V1 generation of the Robosapien, the skeletal structure is independent from the body panels. You can take off all of the "coverings" and the machine below is 100% functional.
Not so with the Robosapien V2, which is a shame. If you want to get at the circuit boards of the Robosapien V2, you have to do without the arms. I don't know who thought of that (or why), but I think it's a real shame. Maybe it has something to do with the arms wiring harness leaving the body panels at the waist and entering the arms at the elbows?
In any case, at the time I took it apart, I knew nothing about the way the robot was constructed and so was made quite anxious by this event of wires getting broken off when the robot fell into pieces on my workbench...eeek!
At that time, pretty much the only things I knew about those two broken wires was what I could see:
I have since determined that this is the connector and wires for the LEFT FOOT MOTOR (robot orientation).
Immediately below the yellow connector is a white connector which I used as a reference in terms of what wire connected where, hoping that the two connectors were wired the same way. The white connectors also had red and brown wires connecting to it and they led to the RIGHT FOOT MOTOR (robot orientation).
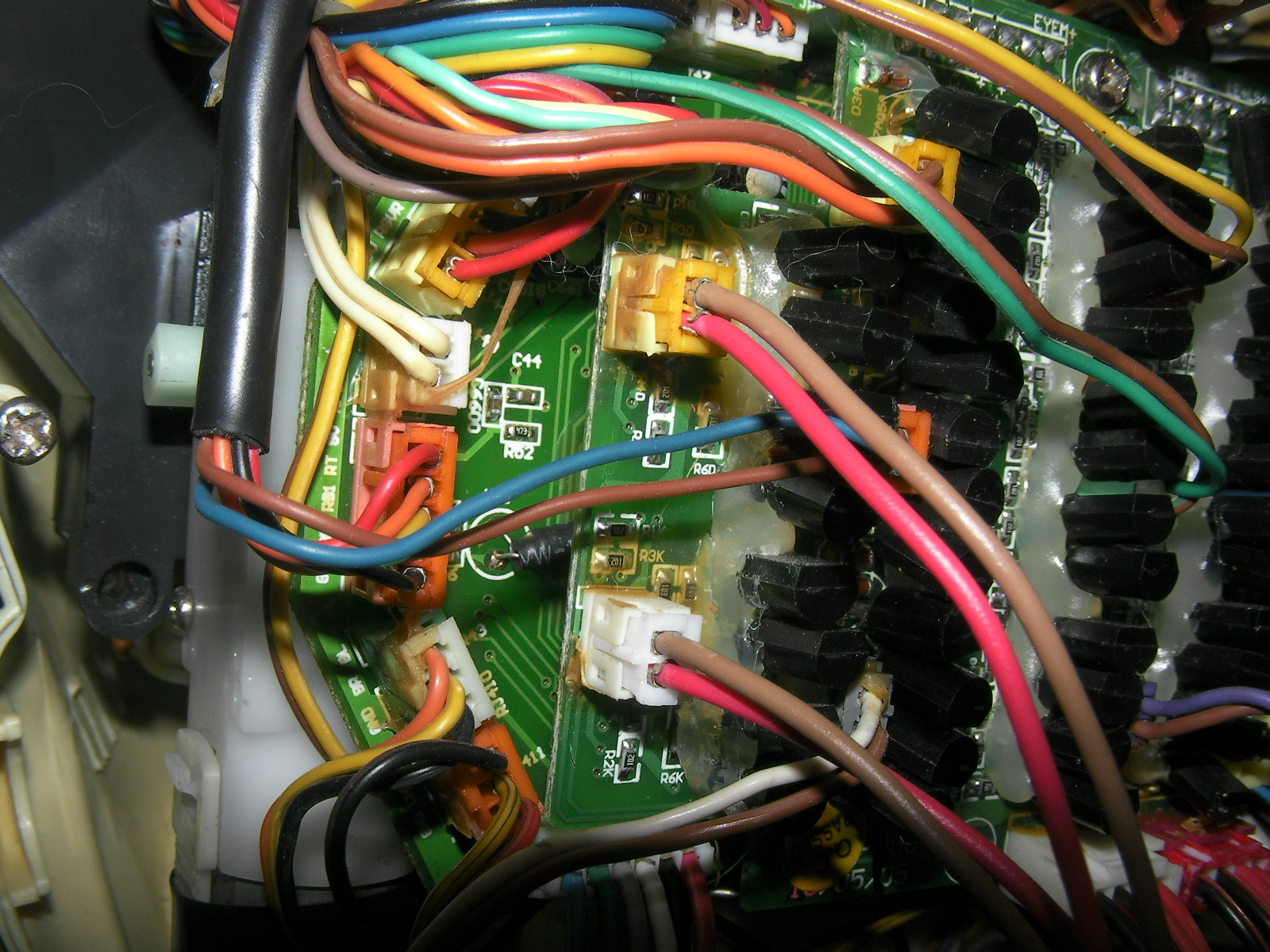
Seeing as this was early days, I forgot to take a picture of the damaged cables - so here's a picture of the repaired cables:

In the V1 generation of the Robosapien, the skeletal structure is independent from the body panels. You can take off all of the "coverings" and the machine below is 100% functional.
Not so with the Robosapien V2, which is a shame. If you want to get at the circuit boards of the Robosapien V2, you have to do without the arms. I don't know who thought of that (or why), but I think it's a real shame. Maybe it has something to do with the arms wiring harness leaving the body panels at the waist and entering the arms at the elbows?
In any case, at the time I took it apart, I knew nothing about the way the robot was constructed and so was made quite anxious by this event of wires getting broken off when the robot fell into pieces on my workbench...eeek!
At that time, pretty much the only things I knew about those two broken wires was what I could see:
- They connected to a connector that was yellow
- They were brown and red
- They (and the connector) came from the top left of the circuit board
I have since determined that this is the connector and wires for the LEFT FOOT MOTOR (robot orientation).
Immediately below the yellow connector is a white connector which I used as a reference in terms of what wire connected where, hoping that the two connectors were wired the same way. The white connectors also had red and brown wires connecting to it and they led to the RIGHT FOOT MOTOR (robot orientation).
Seeing as this was early days, I forgot to take a picture of the damaged cables - so here's a picture of the repaired cables:
Why are the Robosapien V2 foot motor wires brown and red? I do not know.
Interesting Observations:
- The wires for the foot motors connect directly from the control board
- The "foot board" PCB is not at all implicated
- This is strange to me
Seeing as I know him personally, I asked the designer, Dr. Mark Tilden, to help me by explaining some aspects of the power arrangement in the Robosapien V2. I was especially interested in the way the batteries were configured (3 x "D" cells + 2 x "AAA" cells).
His kind response was that when he was developing the Robosapien V2 he elected to isolate the "noisy" 9v motor-oriented circuitry from the "neat" logic oriented circuity to keep things cleaner, signal-wise...and to get the Robosapien V2 to market quickly, which makes perfect commercial sense.
He also commented that in later iterations of his own (and others) robots the power isolation/management had been simplified and so too was the battery strategy.
OK. I understand now.






He also commented that in later iterations of his own (and others) robots the power isolation/management had been simplified and so too was the battery strategy.
OK. I understand now.
Robosapien V2 - Motor Board Variations?
I got a bunch of super useful information about the Robosapien V2 Motor Control Board from a couple of really targeted Robosapien websites, EVOSAPIEN and ROBOGUIDE:
I include the images below for both convenience and safety. Both of the above websites are looking distinctly long in the tooth and EVOSAPIEN has not been updated for almost SEVEN YEARS:

(please, I want to capture this information just in case either site just winks out, which would be a real shame. I'm just playing safe - please don't yell at me for snatching images...)

Classic Robosapien V2 Motor Board

Classic Robosapien V2 Motor Board Block Diagram

Classic Robosapien V2 Motor Board Pinouts

Classic Robosapien V2 Motor Board Header and Pad Pinouts
My Motor Board is not like your Motor Board
OK, the above is wonderful and I am really grateful to nocturnal for the resource.
But what if your Robosapien V2 Motor Board doesn't look like the one picured above?
I ask this question because mine doesn't!
Take a look for yourself:
I ask this question because mine doesn't!
Take a look for yourself:


{kind=link}
My "Exotic" Robosapien V2 Motor Board
Apparently, my RSV2 is either non-standard, or a different variation /generation:
- My board is not rectangular.
- My LEFT FOOT and RIGHT FOOT headers are in the mid left of the board.
- My power entry headers are 2 x 4-pin horizontal, not 2 x 2-pin vertical
The pinouts for my board are basically the same, with these differences:
Left Foot
Right Foot
Power (White) - As Viewed
Power (Red) - As Viewed
Left Foot
- Brown
- Red
Right Foot
- Brown
- Red
Power (White) - As Viewed
- Black
- Black
- Red
- Red
Power (Red) - As Viewed
- Black
- Black
- Red
- Red
Motor Orientation Tips:
I suggest that people take careful note of the motor orientation when re-wiring the Robosapien V2. I used the "D" shape of the yellow core of the motor as a reference for wiring orientation because I noticed that the motor is actually flipped 180 degrees between the two feet.
This means that on one foot the red wire is above, on the other foot the red wire is below:
This means that on one foot the red wire is above, on the other foot the red wire is below:

This foot is sane
WTF?
According to my strategy above, a brown wire should be connecting to the bottom of the motor and the bottom of the "D"-shaped plastic fixture, which in this case is right side up.

This foot is insane
So, I took a brown wire from my lovely bunch of 10-Core wires and placed it where it should go...

I then cut off the red bottom wire and took another photo with a white background in place because brown and red are actually pretty close to each other, colour-wise:

Replacement brown wire in place with white background to help with contrast and color identification.
<place photo of completed rewire here>
A Final Word on Robosapien V2 Motors
Here's an excerpt from an interview where Dr. Tilden talks about the motors inside the Robosapien V2:"What kinds of motors are involved? "
"We build our own custom motors and gearboxes, pushing the concept of “toygrade” to the limits while still keeping costs low. In the RS2 we use 12 standard M130 motors for all actions, with a single M21 motor for the eye action. This type of modularity keeps costs low while encouraging high reliability. It’s always amazing how consistent a component gets when you order 27 million of them."
I looked up M130 and M21 motor types mentioned in the article and couldn't find anything except for Mercedes Benz engine types. Huh?
Well, anyway, the foot motors are rewired.
Fixed
the number relates to the can (shell) size and number of wraps on the armature ...
ReplyDelete